-
[ROS2] 2. ROS2 Humble 설치ROS 2024. 2. 1. 23:08728x90

ROS2 Humble ROS2를 시작하면서 Humble을 선택한 이유는 버전의 사용기한이 길어서(End of Life) 미리 준비하고자 하는 생각이다.
이전 포스트에서도 언급한대로 우분투 22.04 버전을 설치 후 ROS2를 섪치하는 과정을 담으려고 한다.
1. 설치 전 세팅
*아래는 ROS2 Humble버전 공식 사이트이다.
Ubuntu (Debian packages) — ROS 2 Documentation: Humble documentation
You're reading the documentation for an older, but still supported, version of ROS 2. For information on the latest version, please have a look at Iron. Ubuntu (Debian packages) Debian packages for ROS 2 Humble Hawksbill are currently available for Ubuntu
docs.ros.org
공식문서에서도 언급한 것이 ROS2 설치 전에 UTF-8로 설정을 맞춰주는 과정이다.(아래 명령어를 순서대로 입력!!)
locale # check for UTF-8#위에 locale 명령어로 UTF-8이 설정이 안되어있다면 아래 명령어로 설정해주자 sudo apt update && sudo apt install locales sudo locale-gen en_US en_US.UTF-8 sudo update-locale LC_ALL=en_US.UTF-8 LANG=en_US.UTF-8 export LANG=en_US.UTF-8 locale # verify settings그 다음으로는 Ubuntu Universe repository 설정에 필요한 패키지 설치
sudo apt install software-properties-common sudo add-apt-repository universeROS2는 GPG key를 받아서 인증을 받고 패키지를 설치해야한다.
그래서 터미널을 키고 아래 명령어를 입력!!
sudo apt update && sudo apt install curl -y sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg아래 명령어는 소스리스트를 repositor에 저장(저장소의 위치를 알려주는 역할)
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null2. ROS2 Humble 설치
먼저 설치에 앞서 해줘야할 Update&Upgrade !!! 매우중요!!!
sudo apt updatesudo apt upgrade대망의 ROS설치!!(시간이 좀 걸릴 수도 있다.)
sudo apt install ros-humble-desktop #부가적으로 설치해주면 좋다!! sudo apt install ros-dev-toolsROS설치를 확인하기 위해 빌드해서 확인해보자
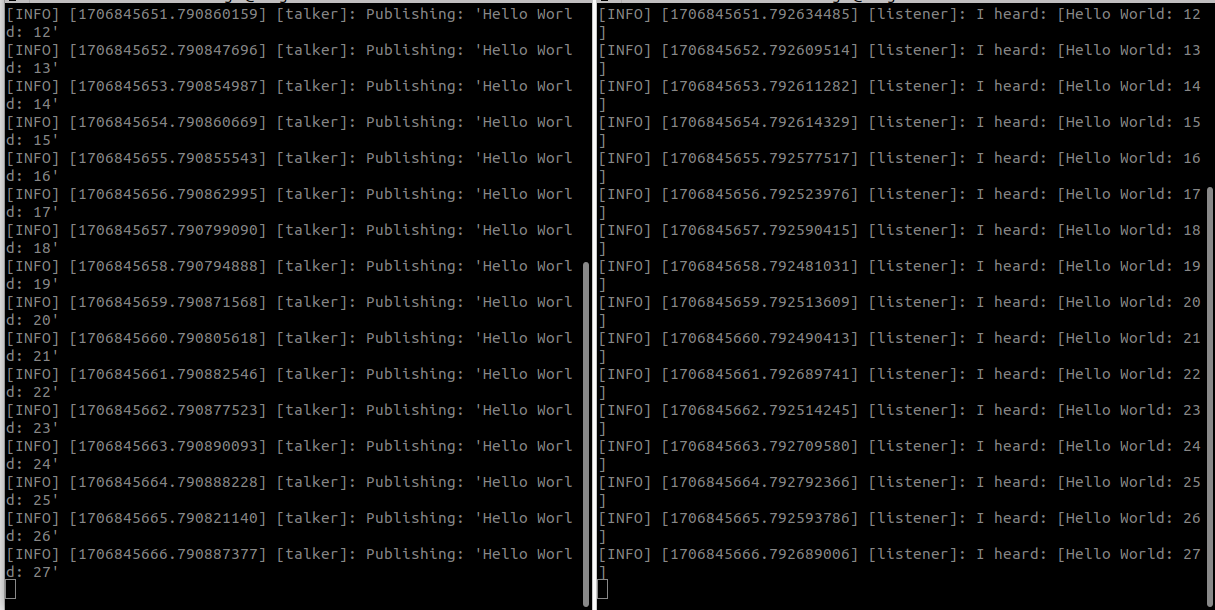
source /opt/ros/humble/setup.bash터미널을 두개를 켜서 다음 명령어를 각각 입력해보자
source /opt/ros/humble/setup.bash ros2 run demo_nodes_cpp talker #뭔가 익숙한 튜토리얼source /opt/ros/humble/setup.bash ros2 run demo_nodes_py listenertalker와 listener가 출력이 잘된다면 일단 설치는 완료
# 추가적으로 ROS2를 매번 불러오기 귀찮다면
#1.gedit 명령어 gedit ~/.bashrc #2.vscode 명령어 code ~/.bashrc #1번과 2번 둘중에 하나를 통해서 아래 명령어 추가 source /opt/ros/humble/setup.bash #저장 후 소싱 source ~/.bashrc#ROS1과 ROS2 차이점
먼저 ROS1에서는 모든 통신은 ROS master를 거쳐서 수행되기 때문에 보안에 있어서도 취약점이 드러났다.
하지만 ROS2에서는 ROS master 없이 DDS(Data Distribution Service) 사용
728x90'ROS' 카테고리의 다른 글
[ROS2] OMO_R1mini gazebo (0) 2024.05.23 [ROS2] launch 파일 작성법 (0) 2024.03.08 [우분투20.04] ROS1 + ROS2 세팅 (0) 2024.03.05 [ROS2] 3. Work Space 만들기 (0) 2024.02.03 [ROS2] 1. 우분투(Ubuntu) 22.04 설치 (0) 2024.02.01